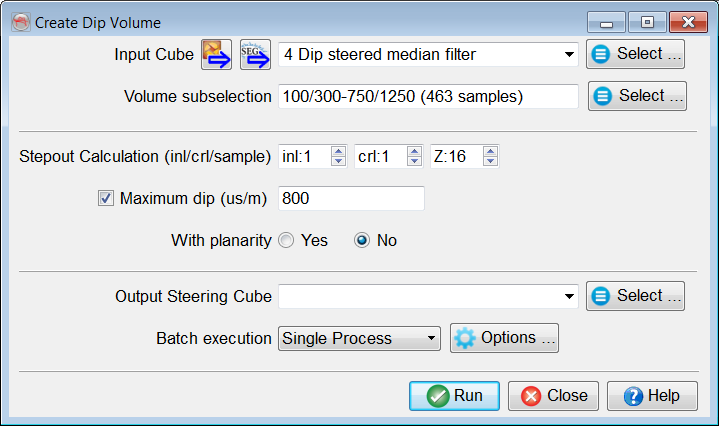
2.1.5 Dip-Steering and Planarity
Dip Estimation using Principal Component Analysis (PCA)
Reflection dips are estimated using Principal Component Analysis from the seismic amplitude field. This specific PCA uses an Eigen Value Decomposition (EVD) in order to extract the direction (as a 3 component vector) of maximum amplitude changes, as the largest eigen value of the decomposition.
This direction is the normal to the wavefront at any position of the seismic reflector, thus perpendicular to the dip. The second and third eigen values will be located within the plane tangent to the seismic reflection.
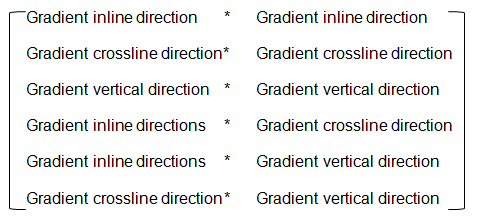
The EVD is applied on a sample by sample basis, using the following six amplitude gradient products, previously computed and smoothed volumetrically using recursive gaussian filters:
The smoothness of the output dip field is entirely determined by the strength of the filters applied to the gradient product attributes prior to the SVD decomposition. Eventually it is not one but three filters that are applied in the vertical, crossline and inline directions consecutively. It is thus possible to adjust each of the three filter strengths independently. Note however that applying a minimum smoothing of 1 in the three directions is essential for a stable estimation of the dip field. Post-processing filtering is usually not required.
Because of filters being recursive filters, a larger number of samples in the direction where the filter is applied is required in order to get stable results. As a result the processing engine will automatically load up to 50 additional samples when available in order to stabilize the result. Running the PCA processing in chunks should thus deliver an almost identical result as running the entire dataset at once. However there will be a runtime penalty if the chunk size is set much smaller than 50 inlines per chunk, for instance using Distributed Computing.
The EVD may optionally output the relative difference between the first two Eigen Values. When applied on seismic reflections, this attribute is proportional to the "planarity" of the reflection: It will reach a maximum of 1 if the reflection locally coincides with the plane tangent to it, have with be always remain larger or equal to zero.
This optional attribute is stored as a third component of the output SteeringCube. The planarity attribute, similar to a similarity attribute, can be used to weight the inversion-based horizon tracking such as Unconformity Tracker or Multi-horizon HorizonCube.